PUG™
Portable Underwater GPS
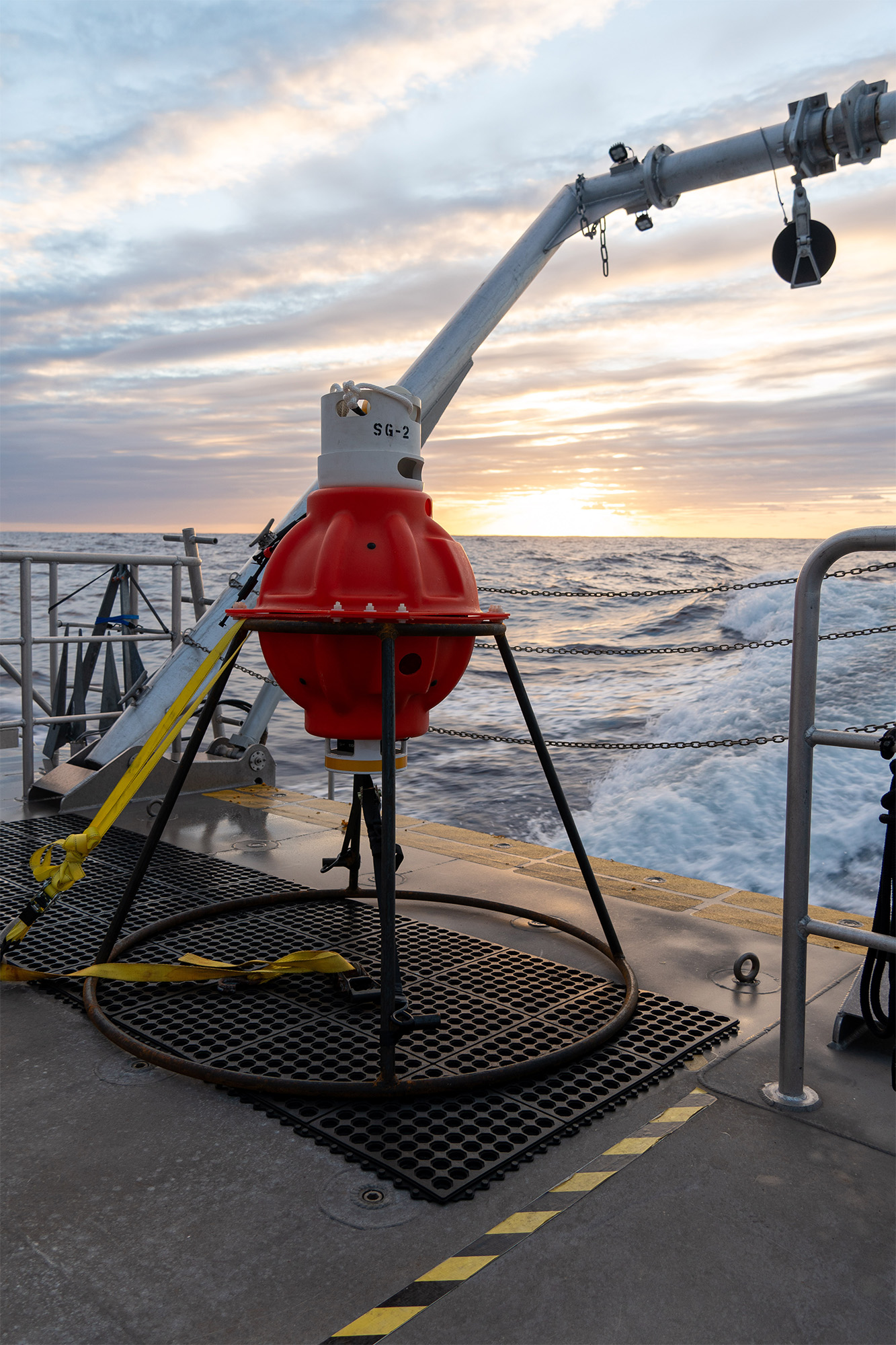
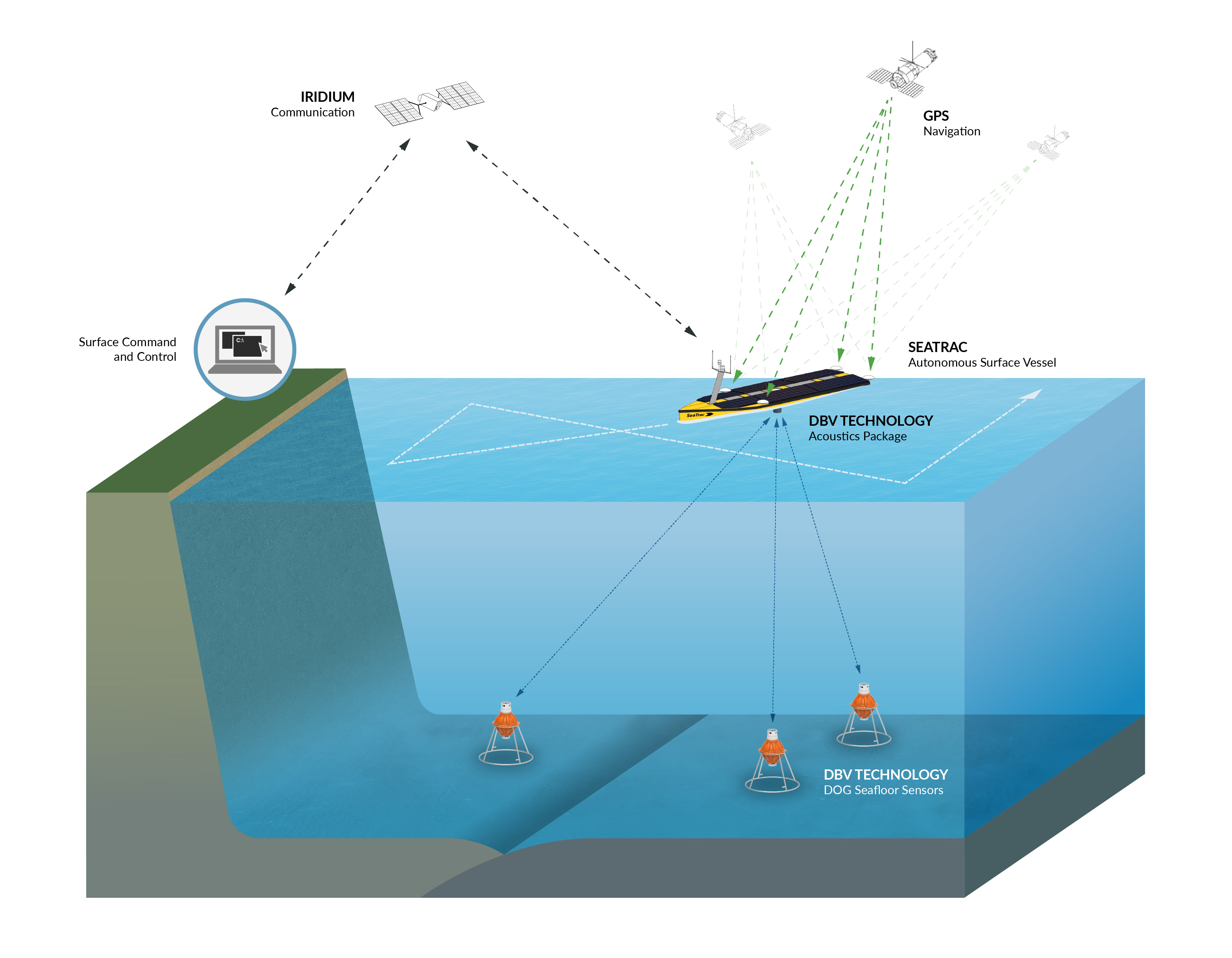
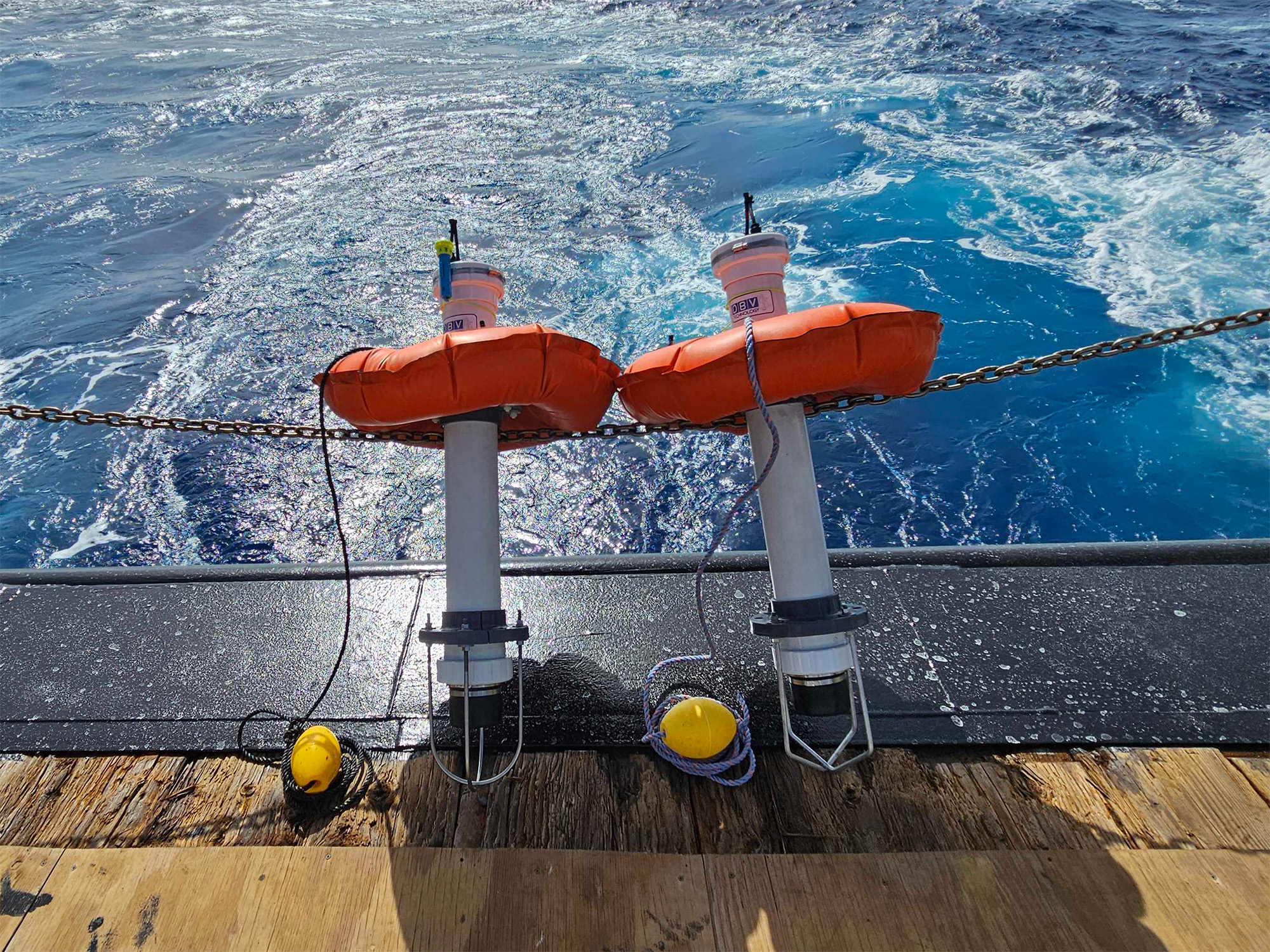
The PUG™ application functions by having several (3 or more) surface platforms transmitting downlink signals to an underwater receiver whose position is to be estimated. The surface platform can be a set of buoys or USVs with the PUG™ components integrated. The surface platforms transmit acoustic signals in a manner analogous to GPS satellites, with reference timing and surface GPS position embedded into the transmission. The compiling and processing of these transmissions is performed on the underwater asset (ROV, AUV, diver) to calculate its location in reference to the PUG™ surface platforms.
Application for PUG™
PUG™ was developed to provide underwater platforms with a position relative to GPS to assist in navigation. Our method, which implements continuous downlinks, allows for an unlimited number of underwater platforms to receive the transmissions and calculate their position. Because of this, it is ideal for experimentation and testing of swarms of undersea vehicles or other operations in which multiple undersea vehicles are simultaneously and independently operated within the same area.